|
|


ТРЕХМЕРНОЕ ИНТЕРАКТИВНОЕ МОДЕЛИРОВАНИЕ ПРИ РАЗРАБОТКЕ ВИРТУАЛЬНЫХ ЛАБОРАТОРНЫХ РАБОТ
ГОУ ВПО Тульский государственный университет:
Павел Валерьевич Губарев , м.т.т.,
Дмитрий Игоревич Троицкий, к.т.н., доц.
Методы разработки и применения виртуальных лабораторных работ (ВЛР) в инженерном образовании в последнее время активно дискутируются. При этом высказываются самые разнообразные точки зрения. В данной статье изложен опыт авторов по созданию и внедрению в учебный процесс кафедры "Автоматизированные станочные системы" Тульского государственного университета ряда ВЛР. Представляется, что ВЛР должна в первую очередь обеспечивать моделирование изучаемых объектов в целом и являться математической моделью объекта, адекватно реагирующей на внешние воздействия - команды, подаваемые обучаемым. Предлагается следующее определение: виртуальная лабораторная работа - информационная система, интерактивно моделирующая с применением средств трехмерной компьютерной визуализации реальный технический объект и его свойства, существенные для изучения.
 Слово
"интерактивно" является ключевым в данном определении, указывая
на динамический характер ВЛР. Компьютерная визуализация объекта - второе
важнейшее условие, которое должно соблюдаться при разработке ВЛР. Как
известно, 95 % информации человек получает от органов зрения и в деле
обучения полностью справедлива поговорка "лучше один раз увидеть…"
Изучение трехмерного динамического изображения некоторого объекта представляет
собой наилучшее возможное приближение к изучению реального объекта.
В ряде случаев лучше применять динамические схемы, показывающие различные
режимы работы.
Слово
"интерактивно" является ключевым в данном определении, указывая
на динамический характер ВЛР. Компьютерная визуализация объекта - второе
важнейшее условие, которое должно соблюдаться при разработке ВЛР. Как
известно, 95 % информации человек получает от органов зрения и в деле
обучения полностью справедлива поговорка "лучше один раз увидеть…"
Изучение трехмерного динамического изображения некоторого объекта представляет
собой наилучшее возможное приближение к изучению реального объекта.
В ряде случаев лучше применять динамические схемы, показывающие различные
режимы работы.
Второй важный вопрос, требующий осмысления - зачем нужны ВЛР? Широко
распространено мнение, что внедрение ВЛР позволит устранить из аудиторий
реальные образцы оборудования без снижения качества обучения. Это явное
заблуждение. ВЛР могут рассматриваться только как вспомогательный инструмент
учебного процесса. Невозможно качественно подготовить инженера, который
видел станок только на экране компьютера. Другое дело - ознакомление
с принципами работы технических объектов, которые трудно постичь на
реальном оборудовании хотя бы в силу того, что не видна кинематика движений,
происходящих внутри корпусов и кожухов, а также объектов повышенной
опасности, к которым доступ студентов исключен.
Методическая поддержка ВЛР заключается в разработке методических указаний и вариантов заданий, определении часов, отводимых на выполнение ВЛР, и др. Как показал опыт использования ВЛР, "методичка" должна быть издана в бумажном виде, это обязательное условие. Электронной "методичкой" при выполнении ВЛР пользоваться невозможно, поскольку постоянное переключение между текстом и ВЛР приводит к тому, что материал перестает усваиваться. Вообще, по всем "компьютерным" курсам методические пособия следует издавать в бумажном виде, поскольку инструмент для работы с электронными пособиями - компьютер - при изучении таких курсов занят изучаемой системой.
 Для
самопроверки знаний студента предлагается перед началом выполнения ВЛР
проводить тестирование знаний по уже изученному материалу. Вопросам
построения тестовых систем посвящены тысячи трудов. Здесь каждый преподаватель
самостоятельно выбирает для себя оптимальное решение. При этом большой
интерес представляет ведение базы данных пользователей ВЛР и их ответов
на тесты, что позволит не только выявлять уровень знаний студента по
каждой изучаемой теме, но и формировать персональные комплекты тестов
с учетом выявленных пробелов.
Для
самопроверки знаний студента предлагается перед началом выполнения ВЛР
проводить тестирование знаний по уже изученному материалу. Вопросам
построения тестовых систем посвящены тысячи трудов. Здесь каждый преподаватель
самостоятельно выбирает для себя оптимальное решение. При этом большой
интерес представляет ведение базы данных пользователей ВЛР и их ответов
на тесты, что позволит не только выявлять уровень знаний студента по
каждой изучаемой теме, но и формировать персональные комплекты тестов
с учетом выявленных пробелов.
Процесс создания ВЛР удалось значительно упростить и стандартизировать за счет разработки специальных средств трехмерной визуализации и анимации, основанных на внедренной в учебный процесс системе трехмерного моделирования КОМПАС-3D компании АСКОН.
Исходная трехмерная модель создается стандартными средствами в КОМПАС-3D, а затем экспортируется в формат VRML. Выбор системы КОМПАС объясняется следующими причинами:
-
широким внедрением данного продукта в учебный процесс (100 % выпускных квалификационных работ по специальности "Системы автоматизированного проектирования" в ТулГУ выполняются с применением КОМПАС);
-
богатыми функциональными возможностями, простым и понятным интерфейсом;
-
корректным экспортом трехмерной геометрии сборки в формат VRML 2.0. Ряд рассмотренных нами систем 3D-моделирования подобный экспорт выполняет неверно.
 Выбор
формата VRML связан с тем, что, во-первых, он включает описание геометрии
объекта (сетка узлов поверхности, векторы нормали, оптические свойства),
а, во-вторых, его синтаксический разбор не представляет больших трудностей.
Разработанный конвертер преобразует описание поверхностей в формате
VRML в двоичное описание объектов, пригодных для работы библиотеки трехмерной
графики OpenGL, входящей в состав операционной системы Windows. Модуль
визуализации выводит модель на экран средствами OpenGL и обеспечивает
базовые операции поворота, масштабирования и пр., а также управление
освещением. Данный модуль реализован как визуальный компонент для среды
программирования Delphi компании CodeGear.
Выбор
формата VRML связан с тем, что, во-первых, он включает описание геометрии
объекта (сетка узлов поверхности, векторы нормали, оптические свойства),
а, во-вторых, его синтаксический разбор не представляет больших трудностей.
Разработанный конвертер преобразует описание поверхностей в формате
VRML в двоичное описание объектов, пригодных для работы библиотеки трехмерной
графики OpenGL, входящей в состав операционной системы Windows. Модуль
визуализации выводит модель на экран средствами OpenGL и обеспечивает
базовые операции поворота, масштабирования и пр., а также управление
освещением. Данный модуль реализован как визуальный компонент для среды
программирования Delphi компании CodeGear.
Компонент выполняет загрузку модели, ее визуализацию и предоставляет программисту широкий набор свойств и методов для управления трехмерной сценой. Входящие в сцену детали можно перемещать, поворачивать, масштабировать, менять их цвет, задавать условия освещенности и оптические свойства. Кинематика движений может быть очень сложной благодаря использованию динамического массива осей вращения деталей, что позволяет легко моделировать даже планетарные редукторы. Масштабирование геометрии дает возможность изображать гибкие элементы модели: кожухи, ограждения, провода и шланги.
 Пользовательский
интерфейс и алгоритмы перемещения объектов программируются вручную для
каждой ВЛР, поскольку они полностью зависят от вида моделируемого объекта.
В результате создается независимое приложение, включающее в себя модуль
визуализации, математическое описание самой модели, интерфейс и алгоритмы
реакции объекта на воздействия пользователя.
Пользовательский
интерфейс и алгоритмы перемещения объектов программируются вручную для
каждой ВЛР, поскольку они полностью зависят от вида моделируемого объекта.
В результате создается независимое приложение, включающее в себя модуль
визуализации, математическое описание самой модели, интерфейс и алгоритмы
реакции объекта на воздействия пользователя.
Важной особенностью ВЛР является возможность отработки некоторой управляющей
программы, что позволяет решать широкий круг задач обучения программированию
технологического оборудования. Как правило, на производстве особую сложность
вызывает программирование транспортно-накопительных систем, роботов-манипуляторов,
штабелеров, так как в отличие от станков с ЧПУ для подобного оборудования
не существует единого языка программирования, аналогичного ISO7bit.
Как правило, каждый манипулятор или штабелер программируется неким уникальным
способом - кулачковым механизмом, профилированными дисками и другими
системами механического программного управления. И все же можно говорить
о наличии именно языка программирования, так как программа (например,
для кулачкового механизма) записывается в виде кодовой таблицы.
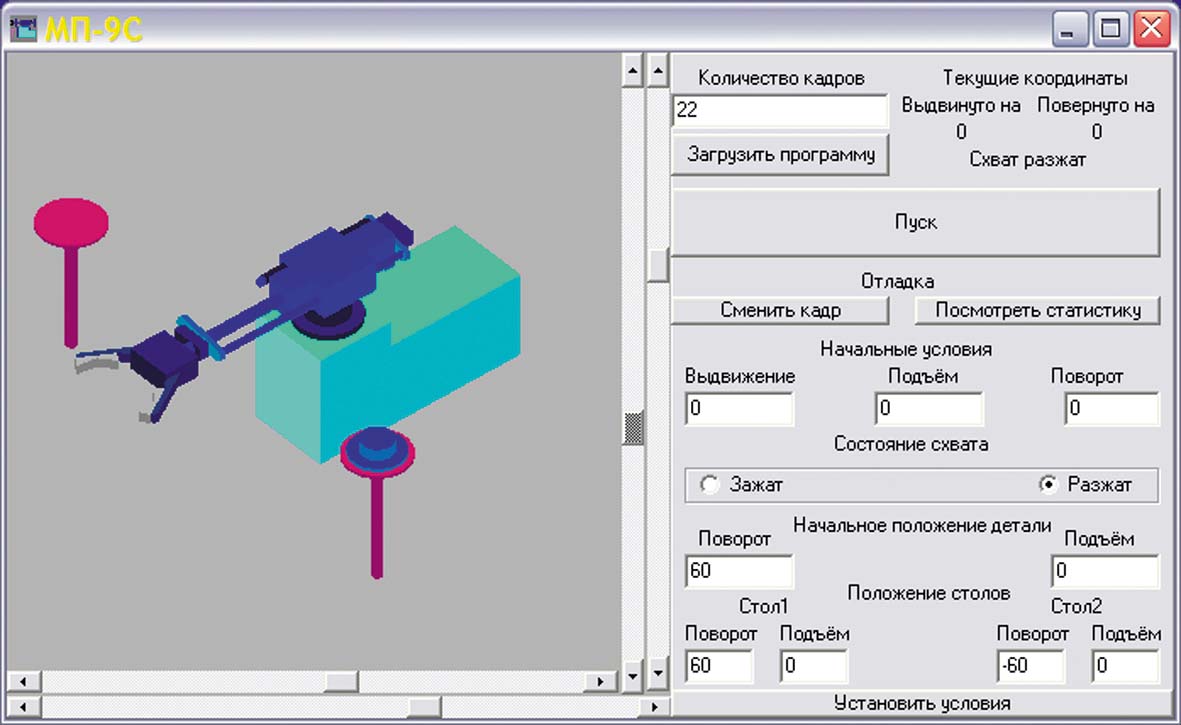
Для облегчения реализации программного управления моделью были разработаны стандартные модули лексического и синтаксического анализаторов, позволяющие с минимальными трудозатратами создавать процедуры разбора и анализа управляющей программы. Например, для ВЛР "Промышленный робот МП-9С" управляющая программа имеет следующий вид:
выдвинуть 156
поворот 30*2
и т.д.
 Для
переноса программы в реальное устройство управления робота достаточно
установить на программном барабане кулачки в соответствии с имеющейся
таблицей (например, оператору "выдвинуть" соответствует кулачок
в пятой позиции; аналогично кулачками в двоичном коде задаются величины
перемещений).
Для
переноса программы в реальное устройство управления робота достаточно
установить на программном барабане кулачки в соответствии с имеющейся
таблицей (например, оператору "выдвинуть" соответствует кулачок
в пятой позиции; аналогично кулачками в двоичном коде задаются величины
перемещений).
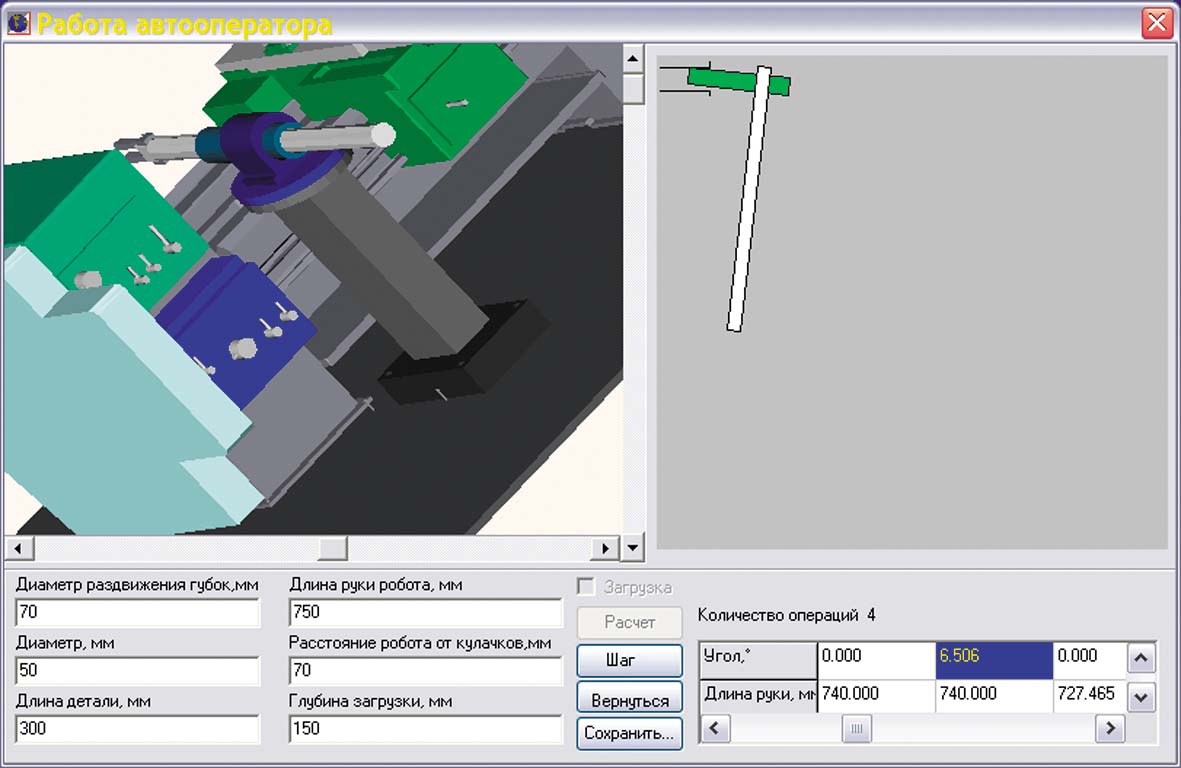
ВЛР оказывают большую помощь в решении задач оптимизации, позволяя без затрат ресурсов "прогонять" различные варианты управляющих программ. Целью работы "Робот-манипулятор токарного станка" является задание оптимальной последовательности перемещений руки робота, обеспечивающей извлечение длинной детали из патрона за наименьшее число операций. Подобные ВЛР имеют не только учебное, но и практическое значение, и могут внедряться в промышленности.
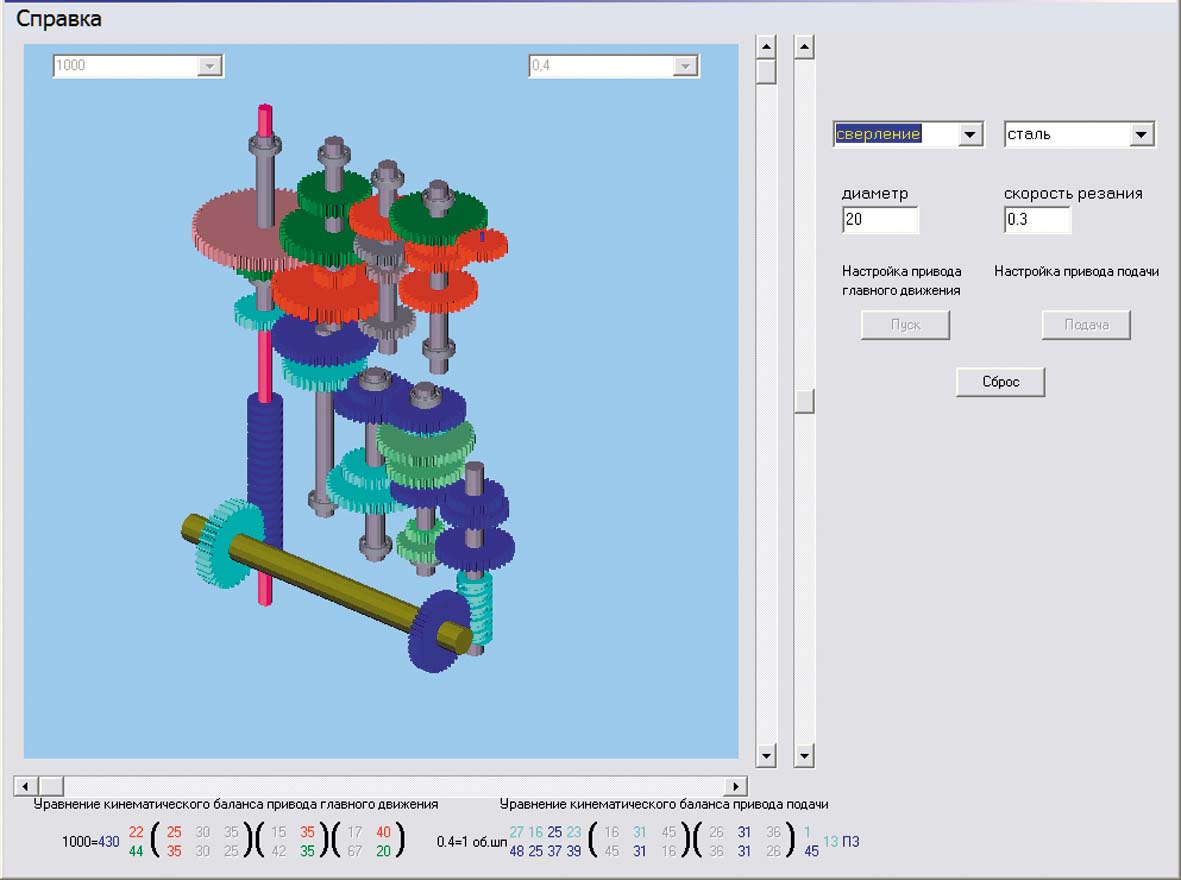
Еще один пример такой ВЛР - выбор оптимального режима резания для сверлильного станка 2Н125. Учащийся получает возможность выбора оптимальной частоты вращения шпинделя и подачи. Кроме того, он может наблюдать за взаимодействием блоков шестерен в приводе, за тем, как они перемещаются и входят в зацепление, и каким образом передается крутящий момент.
Благодаря разработанным программным
библиотекам создание ВЛР удалось поставить "на поток", привлекая
к нему способных студентов в рамках курсового и дипломного проектирования.
Мы готовы рассмотреть предложения о сотрудничестве с другими учебными
заведениями и предприятиями, проявляющими заинтересованность в разработке
ВЛР.