|
|



 ЛЕТИМ
НА ВИНТЕ!
ЛЕТИМ
НА ВИНТЕ!
Концепция скоростного вертолета "Винтолет"
Дмитрий Сергеевич Хмель,
инженер-конструктор
В этом году исполнилось сто лет со дня первого полета человека с использованием подъемной силы винта. Виновник этого события - французский конструктор Поль Корню. Впрочем, его машина способна была лишь поднять пилота (он же сам себе двигатель) и опустить его обратно. Вертолет в том виде, каким мы его знаем: одновинтовой схемы с автоматом перекоса для создания управляющих моментов на винте, был изобретен в 1911 г. нашим соотечественником, учеником Н.Е. Жуковского Б.Н. Юрьевым. Он же заложил основы расчета винта вертолета. Создать вертолет оказалось непросто и первые успехи вертолет начал совершать в тридцатых годах ХХ века. Геликоптеры созданные знаменитым русским авиаконструктором И.И. Сикорским успешно проложили путь в небо, положив начало безаэродромной авиации. Уникальные возможности вертолета сейчас по достоинству оценены всеми и несмотря на то, что вертолет проигрывает самолету по скорости, дальности и экономичности, ему нет равных там, где нужен вертикальный взлет и посадка.
 Несомненно,
если бы скорость полета вертолета была близка к максимальной скорости
винтовых самолетов, то они составляли бы основную часть авиации. В наше
время некоторые автомобили и поезда развивают скорость до 400 км/ч.
Так почему же эти скорости являются пределом для вертолета?
Несомненно,
если бы скорость полета вертолета была близка к максимальной скорости
винтовых самолетов, то они составляли бы основную часть авиации. В наше
время некоторые автомобили и поезда развивают скорость до 400 км/ч.
Так почему же эти скорости являются пределом для вертолета?
Дело в том, что набегающим потоком несущий винт обдувается в направлении, близком к плоскости вращения, что приводит к увеличению скоростей обтекания наступающей лопасти и уменьшению скорости на отступающей. Из-за этого при увеличении скорости полета на отступающих лопастях увеличиваются углы атаки (поскольку вертолет должен быть сбалансирован), что приводит к возникновению срывов потока. Кроме того, скорости обтекания концов наступающих лопастей приближаются к скорости звука, что вызывает возникновение скачков уплотнения при относительно небольших скоростях полета.
 В
попытках скрестить безаэродромный взлет и посадку с эффективным полетом
с большими скоростями конструкторами многих стран не один десяток лет
ведутся поисковые разработки, создаются различные варианты летательных
аппаратов вертикального взлета и посадки (ЛАВВИП). Среди всего многообразия
прослеживается два основных класса: самолеты вертикального взлета и
скоростные вертолеты. К последнему классу относится предлагаемая автором
статьи концепция ЛАВВИП под названием "винтолет".
В
попытках скрестить безаэродромный взлет и посадку с эффективным полетом
с большими скоростями конструкторами многих стран не один десяток лет
ведутся поисковые разработки, создаются различные варианты летательных
аппаратов вертикального взлета и посадки (ЛАВВИП). Среди всего многообразия
прослеживается два основных класса: самолеты вертикального взлета и
скоростные вертолеты. К последнему классу относится предлагаемая автором
статьи концепция ЛАВВИП под названием "винтолет".
Наблюдая разнообразие летающих существ в природе, мы видим, что наиболее совершенные пернатые обитатели небес создают силы для полета на движущемся крыле и у них отсутствуют какие либо дополнительные поверхности для создания тяги. Такой выбор Величайшего Конструктора закономерен, ведь птицы созданы для длительных полетов.
 У
несущего винта лопасти движутся с большой скоростью в горизонтальной
плоскости, а машущее крыло значительно медленнее - в вертикальной плоскости
в горизонтальном полете, за исключением тех случаев, когда для взлета,
в основном небольшие пернатые летуны, используют перемещение крыла по
горизонтали. В полете при движении крыла вниз подъемная сила крыла отклоняется
вперед и по мере увеличения скорости движения вниз крыло начинает создавать
тягу, а при движении вверх наоборот силы отклоняются назад, создавая
силу торможения. У пернатых машущее крыло во время движения постоянно
изменяет угол установки, площадь обдува, скорость движения и прочие
параметры для того, чтобы создать при махе вниз силы большей величины,
чем при движении крыла вверх. В результате птицы, поддерживая себя в
полете, продвигаются вперед.
У
несущего винта лопасти движутся с большой скоростью в горизонтальной
плоскости, а машущее крыло значительно медленнее - в вертикальной плоскости
в горизонтальном полете, за исключением тех случаев, когда для взлета,
в основном небольшие пернатые летуны, используют перемещение крыла по
горизонтали. В полете при движении крыла вниз подъемная сила крыла отклоняется
вперед и по мере увеличения скорости движения вниз крыло начинает создавать
тягу, а при движении вверх наоборот силы отклоняются назад, создавая
силу торможения. У пернатых машущее крыло во время движения постоянно
изменяет угол установки, площадь обдува, скорость движения и прочие
параметры для того, чтобы создать при махе вниз силы большей величины,
чем при движении крыла вверх. В результате птицы, поддерживая себя в
полете, продвигаются вперед.
При махе вниз усилие увеличивается для перемещения крыла против подъемной силы, а при движении вверх наоборот силы, создаваемые крылом, становятся меньше и крыло движется по направлению создаваемой на нем силы вверх.
 Аналогично
описанному, в горизонтальном полете на воздушном винте, ось которого
совпадает с направлением полета, кроме тяги (что привычно на винтовых
самолетах) может быть получена подъемная сила за счет изменения углов
лопастей в течении оборота.
Аналогично
описанному, в горизонтальном полете на воздушном винте, ось которого
совпадает с направлением полета, кроме тяги (что привычно на винтовых
самолетах) может быть получена подъемная сила за счет изменения углов
лопастей в течении оборота.
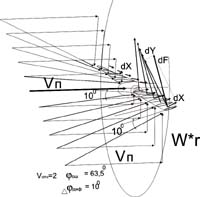
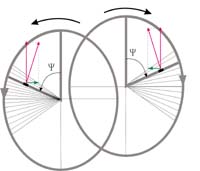
При вращении лопасти в вертикальной плоскости, увеличивая углы установки при движении лопасти вниз, достигают наибольших углов в близи горизонтального положения лопасти, там, где силы на лопасти направлены вверх. Во время дальнейшего вращения вниз и на оставшейся части оборота уменьшают углы с тем, чтобы при движении лопасти вверх, где силы направлены вниз уменьшить углы на лопастях. Изменяя таким образом силы в течение оборота лопасти получим в сумме устойчивую силу направленную вверх и вперед. При этом на винтах противоположного вращения, момент возникающий на одном воздушном винте уравновесится моментом от другого.
Предлагаемый способ полета на воздушных винтах позволит эффективно создавать подъемную силу и тягу, как при низких, так и при высоких скоростях полета, в случае уменьшения окружных скоростей на внешнем радиусе винта по отношению к скорости полета от 1,5 до 2, 3 раз. Потребная тяга будет достигаться при пониженной в несколько раз скорости вращения по отношению к скорости вращения пропеллера самолета, потому что силы на лопасти при движении вниз близки по величине к весу аппарата.
 По
мере замедления вращения, возрастает шаг винта и силы, создаваемые на
лопастях винта отклоняются к плоскости вращения, что приводит к возрастанию
подъемной силы и снижению тяги винта при снижении потребной для вращения
мощности.
По
мере замедления вращения, возрастает шаг винта и силы, создаваемые на
лопастях винта отклоняются к плоскости вращения, что приводит к возрастанию
подъемной силы и снижению тяги винта при снижении потребной для вращения
мощности.
Однако скорость вращения винта должна быть достаточной для отклонения вперед сил на несущих лопастях, создания тяги и преодоления сопротивления остальных лопастей, углы атаки которых близки к нулю, а также для преодоления сопротивления самого летательного аппарата. Использование осевого обтекания винтов позволит винтолету летать значительно быстрее вертолета, а уменьшенные скорости обтекания лопастей позволят даже немного обогнать по скорости винтовые самолеты. Для еще более быстрого полета могут быть использованы высоконагруженные винты со стреловидными лопастями винтовентиляторного типа).
Поскольку для создания максимальной тяги на взлете используют большие окружные скорости вращения, а в полете вращение должно быть замедленно, силовая установка и трансмиссия должны изменять скорость вращения винта в несколько раз, для этого может быть использован редуктор с изменяемым передаточным отношением, а короче говоря - коробка передач. Если же удастся сконструировать винт изменяемого диаметра, то снизить окружные скорости можно телескопически вдвигая лопасти.
 На
малых скоростях винтолет сможет создать тягу вдоль оси винта так же,
как и на винтах вертолета, а при больших скоростях полета и осевом обтекании
винта - подъемную силу перпендикулярно оси и тягу в направлении полета,
управляя вектором силы винтов по величине и направлению, при создании
наибольших углов установки в течение оборота лопасти на одном воздушном
винте в противоположной части по отношению к сектору, на котором создают
наибольшие углы установки на воздушном винте противоположного вращения.
На
малых скоростях винтолет сможет создать тягу вдоль оси винта так же,
как и на винтах вертолета, а при больших скоростях полета и осевом обтекании
винта - подъемную силу перпендикулярно оси и тягу в направлении полета,
управляя вектором силы винтов по величине и направлению, при создании
наибольших углов установки в течение оборота лопасти на одном воздушном
винте в противоположной части по отношению к сектору, на котором создают
наибольшие углы установки на воздушном винте противоположного вращения.
Изменение углов лопастей в течении оборота на винтах у вертолетов производят при помощи автомата перекоса, поворачивая внешнее кольца автомата перекоса, связанное с внутренним вращающимся кольцом, которое начинает совершать колебательное движение и заставляет колебаться и лопасти относительно их продольных осей. В результате одну часть окружности лопасть будет пробегает под большим углом установки, чем противоположную.
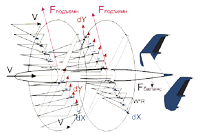
При обтекании винтов вдоль оси достаточно отклонить управляющие кольца на винтах противоположного вращения не в одну сторону, как это делают для создания момента, а в противоположные, для того, чтобы появилась подъемная сила направленная перпендикулярно оси. При этом на каждом из винтов создают уравновешивающие друг друга моменты в противоположные стороны, а не в одну сторону, как это обычно происходит для создания управляющих моментов на винте.
Для дополнительного увеличения подъемной силы винта по отношению к тяге, необходимо перевести лопасти под наибольшие углы в течении всего сектора вращения, когда она движется вблизи горизонтального положения, а на остальной части оборота минимизировать углы атаки на лопасти устанавливая ее под углы флюгирования. Для такого ступенчатого изменения углов установки в течении оборота уже недостаточно обычного автомата перекоса, необходимо использовать силовой привод, непосредственно изменяющий углы лопасти в течении каждого оборота, причем необходимо сконструировать винт из современных высокопрочных материалов, с учетом колебаний которые возникнут при изменении углов лопасти.
В течение оборота величина сил на лопасти винта будет значительно изменяться. Как показывают расчеты, учитывающие маятниковые колебания лопасти под действием переменных сил, для винтов с шарнирно закрепленными лопастями при окружных скоростях на конце лопасти 100 м/с центробежные силы преобладают и колебательное движение лопасти не приводит к значительным последствиям.
Расчет винта со сниженными скоростями вращения при создании сил на лопастях в одной четверти оборота с учетом влияния колебаний лопастей на характеристики винта подтверждает эффективность создания сил. Так, при подъемной силе 2500 кгс на скорости 720 км/ч тяга винтов составит 500 кг при N= 3500 л.с. Такая мощность будет затрачиваться при использовании обычных скоростей вращения винтов на создание той же тяги и на преодоление сопротивления несущего тот же вес крыла с качеством около 8...10.
 Для
увеличения подъемной силы в полете при торможении винтами, уменьшают
углы установки для создания отрицательных углов атаки, при вращении
лопасти вверх, и создают на лопастях силы направленные против движения,
но увеличивающие подъемную силу. При увеличении зоны реверсирования,
создавая на винте силу противоположную тяге, получим подъемную силу
при авторотировании винта. Такой режим можно использовать для полета
со снижением высоты и скорости при отказе двигателя. При наличии движителя
преодолевающего сопротивление винтов его можно использовать для полета
на авторотирующих винтах без использования сложной системы трансмиссии
и редуктора для приведения винтов во вращение.
Для
увеличения подъемной силы в полете при торможении винтами, уменьшают
углы установки для создания отрицательных углов атаки, при вращении
лопасти вверх, и создают на лопастях силы направленные против движения,
но увеличивающие подъемную силу. При увеличении зоны реверсирования,
создавая на винте силу противоположную тяге, получим подъемную силу
при авторотировании винта. Такой режим можно использовать для полета
со снижением высоты и скорости при отказе двигателя. При наличии движителя
преодолевающего сопротивление винтов его можно использовать для полета
на авторотирующих винтах без использования сложной системы трансмиссии
и редуктора для приведения винтов во вращение.
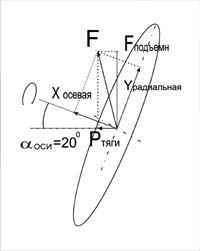
Установка оси под углом до 10° в
горизонтальном полете приведет к тому, что углы атаки на лопасти при
вращении вниз возрастут и уменьшатся при движении вверх, что приведет
к увеличению подъемной силы на винте, но затруднит обеспечение флюгирования
лопастям. Дальнейший наклон оси приводит к увеличению углов атаки и
образованию срывов потока. Осуществление полета при больших углах оси
к горизонтальному положению возможно с уменьшением углов установки во
время движении лопасти вниз в положениях ее близких к горизонтальному
до значений, при которых углы атаки будут меньше углов, приводящих к
срывам потока.
При повороте оси вверх происходит отклонение вверх силы создаваемой
винтом, что приводит к возрастанию подъемной силы винтов при некотором
снижении тяги, что может быть использовано для увеличения подъемной
силы при уменьшении тяги для маневрирования и при переходе к горизонтальному
полету.
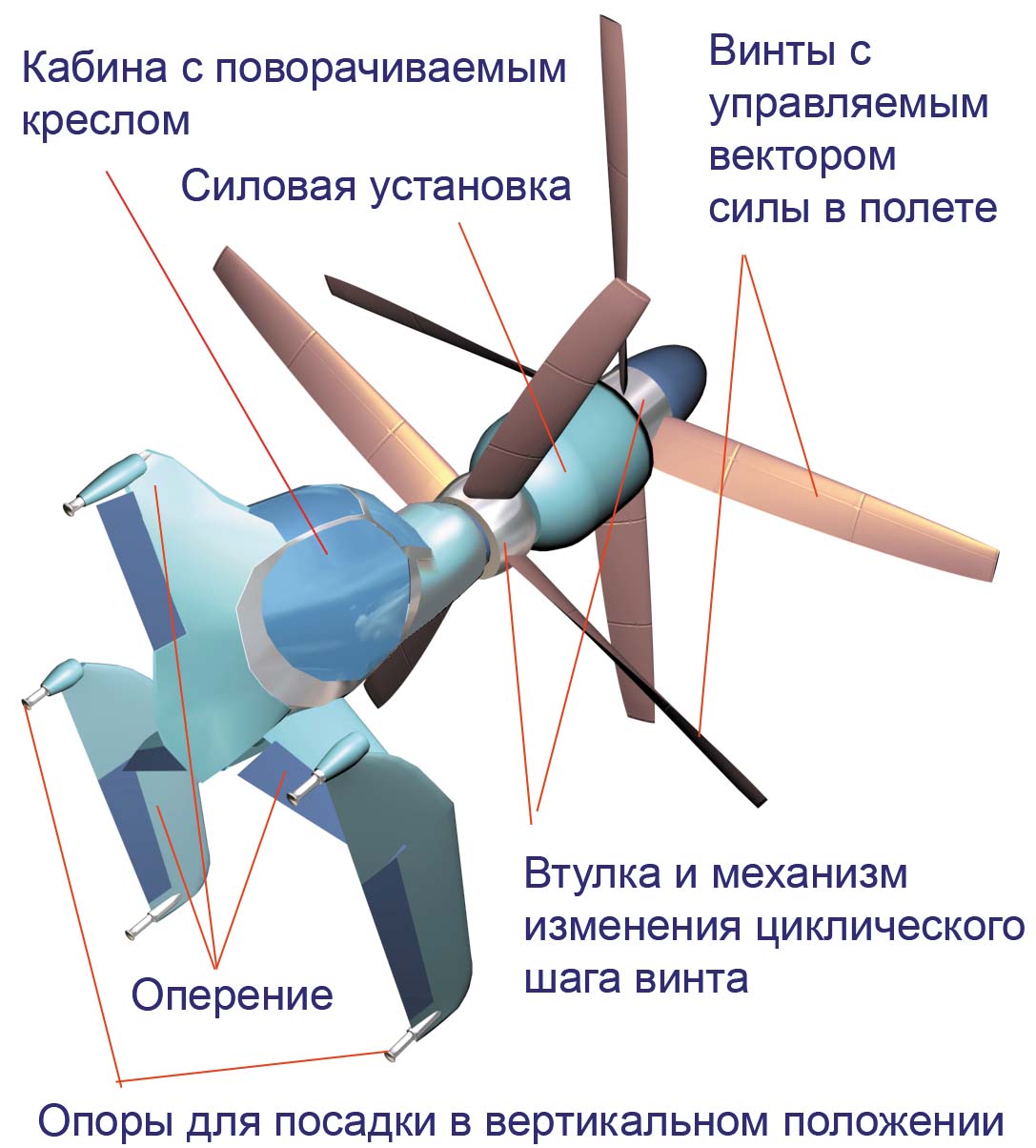
 Для
перехода от вертикального взлёта к горизонтальному, винтолет может применять
как поворот винтов, так и изменение положения летательного аппарата
вместе с винтами. При повороте винтов вместе с корпусом аппарата, винты
могут располагаться в центре корпуса или на равных расстояниях от центра
масс на несущей балке соединяющей носовую и хвостовую части аппарата.
Для управления винтолетом используется автомат перекоса, а в полете
на скорости аппарат управляется преимущественно рулями на стабилизирующем
оперении.
Для
перехода от вертикального взлёта к горизонтальному, винтолет может применять
как поворот винтов, так и изменение положения летательного аппарата
вместе с винтами. При повороте винтов вместе с корпусом аппарата, винты
могут располагаться в центре корпуса или на равных расстояниях от центра
масс на несущей балке соединяющей носовую и хвостовую части аппарата.
Для управления винтолетом используется автомат перекоса, а в полете
на скорости аппарат управляется преимущественно рулями на стабилизирующем
оперении.
Предполагается построить вначале небольшой демонстрационный винтолет с электрическими двигателями, скорость вращения которых можно регулировать в широких пределах. Простота конструкции позволит создавать аппараты с высокой весовой эффективностью. Построенный затем экспериментальный дистанционно пилотируемый винтолет позволит достичь большой скорости и дальности полета и проверить маневренные возможности винтолета. Обладая возможностью зависать, такой винтолет сможет выполнять задачи мониторинга удаленных объектов.
На следующем этапе может быть создан одноместный или двухместный пилотируемый винтолет с вертикальным положением корпуса на взлете и при посадке. Он позволит решать самые разнообразные задачи и может стать безаэродромным средством полета - пилотажным аппаратом по многим параметрам опережающим не только вертолеты, но и самолеты.
Следующий этап - скоростной пассажирский винтолет с поворотными винтами.
Пилотируемый винтолет с поворотными винтами рассчитан на размещение 3-6 пассажиров. Он может быть востребован как личное безаэродромное транспортное средство. В варианте аэротакси такой винтолет может обеспечить удобство и оперативность доставки, от двери до двери. Взлетев с площадки, оборудованной на крыше здания в мегаполисе, за два часа полета он перенесет пассажиров на расстояние, которое за это время они могли бы преодолеть только на самолете.
Винтолет сможет с успехом использоваться для перевозки грузов и людей на отдаленные неосвоенные территории в районах крайнего севера, Сибири, Южной Америки (район Амазонки) и Африки. Основным преимуществом по сравнению с самолетом при близкой скорости и эффективности осуществления полета, является безаэродромность. Отсутствие необходимости в дорогостоящей инфраструктуре аэропортов может снизить стоимость эксплуатации винтолета. Перевозки людей, грузов со скоростями от 600 до 800 км/ч на расстояние 1000…2000 км составляют большую часть пассажиропотока. Винтолет может эффективно использоваться в этом секторе перевозок как вместо вертолетов, так и вместо самолетов средней дальности и, кроме того, привлечет пассажиров с других видов транспорта из-за удобств и оперативности адресной доставки "от двери до двери".
Продвижение концепции "Винтолет"
должно будет осуществляться "КБ ЛАВВИП".