|
|
НОВЫЕ БЕСШАТУННЫЕ МЕХАНИЗМЫ ДЛЯ ПОРШНЕВЫХ МАШИН
Владимир Александрович Ворогушин,
ведущий инженер Долгопрудненского конструкторского бюро автоматики (ДКБА), к.т.н.
В истории техники едва ли можно найти устройства, которым уделялось бы столько внимания, сколько выпало на долю механизмов преобразования возвратно-поступательного движения во вращательное. Со времен Дж. Пакарда (1780 г. - патент на кривошипно-шатунный механизм (КШМ)) и Дж. Уатта (1784 г. - первая паровая машина с КШМ) тысячи изобретателей разных стран и поколений вдохновенно искали идеальную схему, свободную от недостатков КШМ. Особенно интенсивно этот процесс проходил в ХХ веке и продолжается до сих пор. И каждый раз оказывалось, что большинство предложенных решений излишне сложны, не работоспособны под нагрузкой или ограниченно работоспособны в силу свойственных им недостатков. Позиции же КШМ на фоне общего технологического развития неуклонно укреплялись.
В этом соревновании, среди немногих находок, достойно проявил себя бесшатунный механизм, разработанный известным советским конструктором авиационных двигателей Сергеем Степановичем Баландиным и воплощенный под его руководством в опытных моторах ОМБ, МБ-4, МБ-4б, МБ-8, МБ-8б, ОМ-127РН и ОМ-127РНТ (1937-1951 гг.). После войны, в августе 1946 г., организовано ОКБ-2 при заводе № 500 МАП, где перед коллективом С.С. Баландина была поставлена важнейшая государственная задача - с учетом предшествующего опыта разработки двигателей ОМБ, МБ-4, -4б, -8, -8б, создать для межконтинентального стратегического бомбардировщика мощный поршневой двигатель с цилиндрами двойного действия. Это один из многих примеров того времени, когда творческая энергия разработчиков целенаправленно подкреплялась потоком необходимых государственных ресурсов и дала прекрасные технические результаты.
После снятия режима секретности, благодаря книгам С.С. Баландина [1], бесшатунный механизм стал широко известен и с тех пор не дает покоя многим конструкторам моторной техники. Интерес к теме не спадает. Потенциал идеи активно стимулирует поиски ее новых версий.
Вспомним, что представляет из себя бесшатунный механизм. С.С. Баландиным были исследованы три схемы. Работоспособность подтвердили две из них - с совмещенными эксцентриками и с соединительным синхронизирующим валом [1]. Первая оказалась пригодной только для короткоходовых ДВС, т.к. диаметр совмещенных эксцентриков штоковых подшипников скольжения находится в прямой зависимости от диаметра шеек коленчатого вала, на который они опираются. Вторая не имела этого недостатка, дополнялась другими положительными качествами и поэтому была реализована во всех опытных разработках коллектива С.С. Баландина.
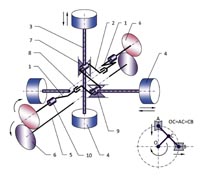 На рис.1 изображена схема бесшатунного механизма с соединительным валом.
На рис.1 изображена схема бесшатунного механизма с соединительным валом.
Промежуточное звено в нем выполнено в виде планетарного коленчатого вала (ПКВ) 2, который своими опорными шейками 8 помещен в подшипники полувалов 1. Назовем их "водилами" (По аналогии с планетарными механизмами). Из схемы понятно, что водила 1 должны вращаться строго синхронно. Эту функцию, одновременно с суммированием мощности, обеспечивает соединительный вал 5 и две пары шестерен 6.
Основное геометрическое условие механизма - равенство между собой эксцентриситета центров шеек ПКВ и эксцентриситета центра его опорного подшипника в водиле 8, т.е. должно быть справедливо выражение вида ОС = АС = СВ (рис. 1). По величине эти эксцентриситеты составляют 1/4 хода поршня Sп.
Для бесшатунных схем С.С. Баландина характерно наличие ползунов 7 (крейцкопфов). Они берут на себя всю боковую рабочую нагрузку. Ползун 7, отделенный от поршня 4 и находящийся в благоприятных условиях смазки, позволил многократно поднять ресурс механизма и обеспечить создание компактных авиационных ДВС с двухсторонним рабочим процессом, первыми представителями которых стали опытные двигатели ОМ-127РН и ОМ-127РНТ, наработавшие на испытательных стендах в разной комплектации 1476 часов [4] без поломок, дефектов и без замены деталей (ЦИАМ. Дело № 10 20-й переборки ОМ-127 № 01).
Тем не менее, для Х-образной схемы возможен вариант без ползунов. В этом случае боковая нагрузка на поверхностях поршней присутствует, но она распадается на два противоположных поршня и поэтому удельное давление их боковых поверхностей на зеркало цилиндров уменьшается в два раза. Вариант без ползунов относится к бесшатунной схеме Чарльза Алджернона Парсонсона - английского инженера, впервые предложившего ее в восьмидесятых годах ХIX века для парового двигателя. По своим свойствам схема является промежуточной. Ее применение технически оправдано в бесшатунных поршневых машинах с цилиндрами одностороннего действия.
Вернемся к рис. 1. В процессе рабочих ходов, штоки 3, с закрепленными на них поршнями 4 цилиндров, совершают прямолинейное возвратно-поступательное движение и передают усилия через штоковый подшипник 9 на шейки ПКВ 2, а они, в свою очередь, через смежные опорные шейки 8 создают на каждом водиле 1 крутящий момент, который суммируется соединительным валом 5 и выводится на выходной вал к потребителю.
В сравнении с ДВС, имеющим традиционный КШМ, двигатели с бесшатунным механизмом С.С. Баландина привлекает к себе внимание рядом ценных качеств. Среди них:
- высокое значение механического к.п.д. (0,93...0,96; к.п.д. двигателя с КШМ 0,78...0,86);
- меньшая теплонапряженность двигателя и связанное с этим уменьшение потребной площади воздушных радиаторов системы охлаждения в 1,5 раза и водо-масляных радиаторов в 2,5...3,0 раза [1];
- возможность использования высоких допустимых средних скоростей поршня;
- большой ресурс цилиндропоршневой группы и механизма движения (тысячи и десятки тысяч часов в зависимости от размерности ДВС);
- отсутствие боковых перекладок поршней в цилиндрах и безизносная работа поршневых канавок для колец [4];
- возможность работы на более высоких степенях сжатия (для бензиновых ДВС безопасная степень сжатия выше на 1...2 единицы);
- возможность реализации двухстороннего рабочего процесса при малых габаритах;
- уменьшенный объем картерного пространства с сохранением достаточной жесткости блок-картера;
- значительно (в 1,6...1,8 раза) меньшие удельные нагрузки на элементы механизма движения благодаря благоприятному сочетанию действия газовых и инерционных сил [1];
- высокая топливная экономичность (удельный расход топлива, при прочих равных условиях, ниже на 10...12%, чем у аналогичных двигателей с КШМ);
- высокая литровая мощность (до 120 кВт/л; в форсированных двигателях до 170 кВт/л);
- высокая удельная мощность (2,2...3,3 кВт/кг и выше);
- низкая удельная масса (0,30...0,45 кг/кВт, в турбопоршневом варианте до 0,14 кг/кВт);
- высокие параметры компактности конструкции (миделевая площадь меньше, чем у двигателей с КШМ в 2 раза).
Этому типу ДВС свойственны и недостатки, большая часть которых преодолима или может быть ослаблена в процессе развития. Некоторые из них характерны для одной схемы, но отсутствуют в другой. Например, одноцилиндровая компоновка бесшатунного механизма реализуется только в схеме с планетарной зубчатой передачей длинноходовой поршневой машины, не требующей наличия ползунов. Аналогично, в длинноходовой поршневой машине с использованием планетарной зубчатой передачи можно спроектировать рядную и оппозитную компоновки бесшатунного механизма, но в схемах с совмещенными эксцентриками и с соединительным валом эти компоновки уже требуют введения на ПКВ дополнительных паразитных шеек с отдельно работающими ползунами.
До недавнего времени оставались неясными причины эффекта "клина" бесшатунного механизма, который мог случайным образом проявиться сразу после сборки двигателя или в процессе его работы под нагрузкой после полного прогрева. Оказалось, что в первом случае основную роль играло отсутствие выверенной методологии назначения номинальных размеров звеньев механизма и не учет некоторых конструктивных факторов работы ползунов в напряженно-деформированном состоянии [2]. Во втором случае, при проектировании не было уделено достаточно внимания конструктивным мерам, компенсирующим температурные деформации и производственные погрешности несходимости пересечения осей цилиндров с центральной осью блок-картера [3]. Соответственно, там, где эффект "клина" давал о себе знать, восстановление работоспособности двигателя требовало проведения доводочных работ, что расценивалось как серьезное препятствие для крупносерийного производства. В настоящее время методология назначения номинальных размеров звеньев бесшатунного механизма разработана [2]. Конструктивные меры по компенсации температурных деформаций и минимизации погрешностей пересечения осей определены [3], а связанные с эффектом "клина" препятствия для организации крупносерийного производства бесшатунных поршневых машин сняты.
Схемы бесшатунных механизмов с совмещенными эксцентриками и с соединительным валом имеют следующие недостатки:
- оппозитная и рядная компоновка содержат на ПКВ дополнительные паразитные шейки, направляющие и массивные ползуны (компенсация массы отсутствующих штоков и поршней) (частично преодолимо);
- более сложная конструкция по сравнению с КШМ (частично преодолимо);
- необходимость учета последствий наличия в схеме лишней кинематической связи (отрицательное влияние преодолимо);
- удвоенная угловая и линейная скорость вращения опорных подшипников ПКВ (преодолимо в части снижения удвоенных линейных скоростей);
- наличие соединительного вала с двумя парами шестерен (преодолимо);
- неравномерный износ рабочих поверхностей опорных подшипников ПКВ в водилах, вызываемый наличием технологического зазора в парах зубчатых зацеплений и конечной жесткости всей синхронизирующей цепи (преодолимо).
Новым конструктивным решениям, исключающим последние три недостатка, и посвящена данная статья.
Изучение материалов книги С.С. Баландина [1] постоянно наводило на мысль о том, что должны существовать более простые варианты бесшатунного механизма. На это косвенно указывало наличие разных и, вместе с тем, тесно взаимосвязанных недостатков трех исследованных С.С. Баландиным схем. В процессе решения обратных задач построения бесшатунного механизма догадка подтвердилась.
В самом деле, если в штоковом подшипнике мы имеем слишком большой диаметр спаренных эксцентриков, то логичнее все-таки перенести их в центральные опоры, а штоковые шейки сделать оптимального диаметра, что фактически и было выполнено в двигателях ОМБ, МБ-4, МБ-8, ОМ-127РН, ОМ-127РНТ и М-127К, хотя в книге С.С. Баландина [1] данный момент специально не оговаривается. Но тогда на концах ПКВ мы имеем два отдельных полувала с водилами, которые приходится синхронизировать соединительным валом и двумя парами шестерен. Так может быть создать возможность непосредственной передачи крутящего момента потребителю прямо от ПКВ в процессе его планетарного движения?
Но как? Передача крутящего момента через планетарную зубчатую передачу не обеспечивается прочностью саттелитной шестерни короткоходовых ДВС [1].
Поставить между выходным валом и ПКВ карданный вал? Однако, его угловой наклон из-за быстрого роста потерь, не должен превышать 10...12°, а это существенно увеличивает продольный размер двигателя.
Использовать ШРУС? В отличие от карданного вала ШРУС дает рабочие углы смещения между осями до 40° - что привлекательно, но он сложен, дорог и менее надежен, чем сам ДВС. К тому же, общим недостатком карданного соединения и ШРУСов для названного применения является избыточная функциональность. Они передают мощность не только между параллельными осями, но и при их угловом смещении во время работы, что в поставленной задаче не требуется.
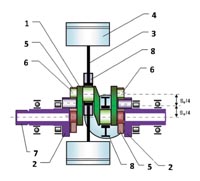 Выбор пал на принцип шарнирного параллелограмма. Он дает нам именно то, что нужно - передачу мощности контактными цилиндрическими поверхностями между соосными валами с постоянным эксцентриситетом. В результате весь бесшатунный механизм резко упростился. Исчез синхронизирующий соединительный вал с его опорами и двумя парами шестерен. Конструкция стала заметно технологичней, менее трудоемкой в изготовлении и сборке. В итоге, появилась новая схема бесшатунного механизма в варианте А (рис. 2).
Выбор пал на принцип шарнирного параллелограмма. Он дает нам именно то, что нужно - передачу мощности контактными цилиндрическими поверхностями между соосными валами с постоянным эксцентриситетом. В результате весь бесшатунный механизм резко упростился. Исчез синхронизирующий соединительный вал с его опорами и двумя парами шестерен. Конструкция стала заметно технологичней, менее трудоемкой в изготовлении и сборке. В итоге, появилась новая схема бесшатунного механизма в варианте А (рис. 2).
Принцип работы сохранился. Противоположно сидящие на штоке 3 поршни 4 передают рабочие усилия на шейки ПКВ 1. Ось ПКВ совершает планетарное вращение вокруг центральной оси (переносное движение) и вращение вокруг собственной оси в противоположном направлении (относительное движение). Весь полезный крутящий момент передается в относительном движении. Он идет напрямую от ПКВ 1 через элементы шарнирного параллелограмма на выходной вал 7. Основными элементами шарнирного параллелограмма здесь являются силовые пальцы 6 и вращающиеся на них серьги 5. Силовые пальцы 6 запрессованы в план-шайбу 8 ПКВ и в план-шайбу 9 выходного вала симметрично на расчетном радиусе окружности. Их количество на одной плоскости план-шайбы может быть от трёх до девяти. Как правило, достаточно иметь по три силовых пальца на каждой план-шайбе.
Остается выяснить роль тех элементов, на которые опирается ПКВ при своем планетарном вращении. Если в механизме С.С. Баландина с соединительным валом ПКВ не передавал крутящего момента, а работал по своим опорам в поперечном направлении как связанная группа перпендикулярных стержней, то в схеме на рис. 2 роли поменялись. Здесь, подобно перпендикулярным стержням, работают центральные опорные эксцентрики 2 (ЦОЭ), обеспечивая восприятие и передачу на корпус блок-картера поперечных опорных нагрузок от ПКВ. Крутящий момент через ЦОЭ не передается. Вместо подшипников скольжения на них легко можно использовать подшипники качения.
Казалось бы, принимая во внимание взаимно перпендикулярное расположение несущих поверхностей ползунов (если угол развала цилиндров 90°), можно было бы изъять ЦОЭ из данной схемы, ликвидировав лишнюю кинематическую связь, но делать этого не следует по двум причинам. Во-первых, ЦОЭ выполняет в кинематической схеме бесшатунного механизма важную функцию точки опоры С при эстафетной передаче боковых нагрузок через балку АСВ (рис. 1) между ползунами смежных пар цилиндров во время прямого и обратного хода поршней. Этот принципиальный момент работы бесшатунного механизма в свое время обоснован еще С.С. Баландиным [1]. Во-вторых, ЦОЭ всегда находится в противофазе к поршню, достигающему ВМТ, поэтому его боковая поверхность служит местом закрепления уравновешивающих противовесов для каждого двухцилиндрового (схема V) или четырехцилиндрового (схема Х) модуля цилиндров.
До сих пор речь шла об использовании принципа шарнирного параллелограмма для передачи крутящего момента двигателя на выходной вал с конца цельного ПКВ, что характерно для варианта А. Однако выяснилось, что элементам шарнирного параллелограмма вполне по силам взять на себя поперечную опорную нагрузку от газовых и инерционных сил, действующих в плоскости модуля цилиндров. Иными словами, появилась возможность отказаться от опорных шеек ПКВ с ЦОЭ, заменив их силовыми пальцами и серьгами шарнирного параллелограмма, и получить в результате еще более простой вариант бесшатунного механизма. Его схема, обозначенная как вариант Б, изображена на рис. 3 в приложении к четырёхцилиндровому двигателю.
Факт отсутствия опорных шеек ПКВ и ЦОЭ делает механизм не только еще более простым, а значит и надежным, но и придает ему новые важные свойства. Например, впервые открывается возможность создания компактных транспортных длинноходовых конструкций ДВС с отношением Sп/Dц = 1,6...2,4 при сохранении оборотности, свойственной двигателям с КШМ. При этом удается в значительной мере реализовать известные [1] скоростные резервы бесшатунного механизма, которые были выявлены в нем еще в начальный период развития. Средние скорости поршней в длинноходовом варианте Б безопасно могут выбираться в более высоком диапазоне 16…24 м/с (у КШМ 10…12 м/с). В результате длинноходовые бесшатунные ДВС получают более пологую характеристику момента, что придает им хорошие тяговые качества. Меньшее отношение площади камеры сгорания (КС) к ее объему заметно уменьшает потери тепла в цикле. Обеспечивается повышенный линейный размер КС, что важно, например, для дизелей сверхвысокого сжатия, где возникают серьезные трудности с формированием геометрии надпоршневого пространства.
Построение гармоник изменения напряжений элементов ПКВ в варианте Б подсказывает, что в нем должно происходить продольное затухание амплитуды крутильных колебаний, так как каждая пара его силовых пальцев по торцам имеет отдельные вращающиеся в противоположную ПКВ сторону серьги, которые работают по углу поворота вала попеременно на сжатие и растяжение. Амплитуды изменения напряжений в них не совпадают с амплитудой колебаний напряжений от крутящего момента смежных шеек ПКВ. Причем, наличие нескольких парных несущих гидродинамических масляных слоев на поверхностях скольжения силовых пальцев шарнирного параллелограмма создает дополнительный демпфирующий эффект.
Возникает вопрос - а как же функция точки опоры С (рис. 1) при эстафетной передаче боковых нагрузок между ползунами смежных пар цилиндров по балке АСВ, которую ЦОЭ исполняют в варианте А. Ведь, как было сказано выше, эта функция важна и необходима для правильной работы бесшатунного механизма.
Противоречия на самом деле нет. Названая функция реализуется серьгами шарнирного параллелограмма непосредственно в процессе вращения на силовых пальцах. Серьги механизма в варианте Б становятся звеном ОС (рис. 1) вместо изъятых ЦОЭ (рис. 2).
Отметим достоинства и недостатки разработанных бесшатунных схем вариантов А и Б по отношению к схемам, исследованным С.С. Баландиным.
Достоинства:
- значительное упрощение конструкции, благодаря отсутствию в вариантах А и Б двух пар шестерен и синхронизирующего вала с его опорами, а в варианте Б, дополнительно, - изъятию опорных шеек ПКВ и ЦОЭ;
- в варианте Б нет высоких линейных скоростей на рабочих поверхностях штоковых шеек ввиду отсутствия эксцентриков большого диаметра;
- диаметр силовых пальцев шарнирного параллелограмма в несколько раз меньше диаметра штоковых шеек ПКВ, соответственно, несмотря на двойную угловую скорость вращения сопрягаемых элементов, двойная линейная скорость скольжения на их рабочих поверхностях становится по величине меньше одинарной скорости скольжения на штоковых шейках ПКВ;
- вариант Б допускает создание длинноходовых конструкций поршневых машин с отношением Sп/Dц = 1,6…2,4;
- в варианте Б длинноходового исполнения реализуются большие средние скорости поршня (16...24 м/с и выше) с запасом по быстроходности, в том числе для кратковременных чрезвычайных режимов;
- в варианте Б угловой сдвиг расположения каждой пары штоковых шеек ПКВ, например на 120° или 180°, реализуется без существенного усложнения конструкции;
- вариант Б меньше подвержен отрицательным последствиям крутильных колебаний ПКВ и обладает внутренним демпфирующим эффектом;
- в варианте Б силовые пальцы разгружаются при работе механизма также, как опорные шейки механизмов, исследованных С.С. Баландиным [1];
- уменьшено количество разнотипных деталей;
- как следствие, снижена трудоемкость производства и металлоемкость изделия;
- за счет простоты формы элементов шарнирного параллелограмма обеспечена хорошая технологичность конструкции механизма;
- серьги шарнирного параллелограмма допускают совместную механическую обработку сопрягаемых поверхностей, что позволяет легко обеспечить необходимую групповую точность заданного межосевого расстояния;
- как следствие, упрощена сборка и разборка;
- дополнительно (примерно на 35…40%) уменьшен потребный диаметральный размер картерного пространства при сохранении достаточной жесткости блок-картера.
Недостатки:
- в варианте А остаются эксцентрики большого диаметра (ЦОЭ) с высокими линейными скоростями скольжения поверхностей, поэтому отношение Sп/Dц здесь имеет ограничение Sп/Dц = 0,7…0,9, характерное для короткоходовых ДВС. Верхнюю границу указанного интервала можно поднять до 1,2 и даже выше, если использовать возможность размещения в ЦОЭ шариковых или роликовых подшипников с керамическими телами качения;
- в варианте А ПКВ подвержен воздействию крутильных колебаний с теми же закономерностями, что и коленчатый вал двигателя с КШМ;
- в варианте А угловой сдвиг расположения пар штоковых шеек ПКВ (например, на 120° или 180°) требует жесткой синхронизации всех ЦОЭ дополнительным валом с парами шестерен, что упраздняет преимущества схемы и поэтому не применяется;
- узким местом для вариантов А и Б является необходимость обеспечения высокой координатной точности расположения силовых пальцев на план-шайбах ПКВ относительно центров штоковых шеек и на план-шайбах центрального опорного вала относительно его центра. По условию собираемости, с увеличением числа силовых пальцев требования к точности повышаются;
- в варианте Б сложнее решаются вопросы обеспечения балансировки, т.к. серьги шарнирного параллелограмма, совершающие противоположное коленчатому валу вращение, малы по размерам и на них нет возможности разместить противовесы требуемой массы.
Варианты А и Б могут быть реализованы в следующих компоновках:
- V-образная. 2-, 4-, 6-, 8-, 12-, 16-цилиндровые;
- X-образная. 4-, 8-, 12-, 16-, 20-, 24-, 28-, 32-цилиндровые;
- оппозитная (с паразитными шейками ПКВ). 2-, 4-, 6-, 8-, 12-, 16-цилиндровые;
- рядная (с паразитными шейками ПКВ). 2-, 4-, 6-, 8-, 12-, 16-цилиндровые.
Вопрос о том, какой из вариантов А или Б бесшатунного механизма использовать в конкретной бесшатунной схеме должен решаться исходя из анализа требований к будущей поршневой машине. Так, вариант А лучше приспособлен для двухцилиндрового рядного и четырёхцилиндрового оппозитного ДВС с паразитной шейкой на ПКВ. В этих схемах он позволяет получить симметричный ПКВ и в два раза снизить общую величину уравновешивающих масс. Вариант Б является универсальным. Он хорошо вписывается во все приведенные выше типы компоновок, имеет минимальные величины уравновешивающих масс и может быть применен не только для вновь создаваемых поршневых машин, но и для модернизации серийной продукции с КШМ.
По вопросу о компоновках уместно возразить - зачем обсуждать оппозитные и рядные двигатели с паразитными шейками на ПКВ, когда обычный КШМ для этих типов схем получается проще. Действительно, если преследовать цель повторения пройденного опыта, то применение КШМ не худший выход. Но, если ставится цель достижения нового уровня конструкции ДВС с реализацией скоростных, ресурсных, массово-габаритных и других возможностей бесшатунного механизма, то необходимо учитывать, что паразитная шейка может заменять собой соответствующую опорную шейку ПКВ, отличаясь только тем, что на нее будет одет ползун, имеющий свободу перемещения в направлении отличном от направления оси рабочих цилиндров (обычно под углом 90°). Так, для четырёхцилиндровых оппозитных или двухцилиндровых рядных бесшатунных двигателей требуется всего одна такая шейка, а уравновешивающие массы распределяются в равных долях между ПКВ и ЦОЭ. В двухтактных двигателях паразитная шейка с одного конца может быть загружена продувочным поршнем, работающим в отдельном вспомогательном цилиндре.
И это еще не все. В автомобилестроении последнее десятилетие прослеживается тенденция к уменьшению рабочих объемов ДВС с переходом на гибридные силовые установки. В машинах появляется дополнительный достаточно мощный разгонный электродвигатель. Стоимость гибридного автомобиля возрастает примерно на 40% и окупается только при длительной интенсивной эксплуатации.
В противовес гибридной схеме бесшатунный двигатель, благодаря прямолинейному движению штока и поршня, позволяет решить те же задачи в одном компактном агрегате. Особенность заключается в том, что подпоршневые объемы в рабочих цилиндрах используются последовательно по времени как компрессорные, двигательные и тормозные полости с возможностью рекуперации части кинетической энергии движения.
Когда имеется избыток мощности основных рабочих цилиндров, он расходуется подпоршневыми объемами в компрессорном режиме. Происходит подкачка разгонного воздушного баллона. В процессе разгона подпоршневые полости работают совместно с рабочими цилиндрами, переключаясь в двигательный режим. Расходуется энергия сжатого воздуха, накопленная в тормозном и разгонном баллоне. В трансмиссию автомобиля добавляется необходимое приращение мощности и крутящего момента. Наконец, при торможении основные рабочие цилиндры работают на минимальной мощности, а подпоршневые полости рекуперируют кинетическую энергию движения путем изменения интенсивности подкачки тормозного баллона при помощи тормозной педали.
В силовой установке с обычным КШМ описанный алгоритм можно реализовать только в двух отдельных агрегатах и с худшим общим к.п.д. В бесшатунном двигателе общий потребный объем силовой установки с учетом параметров длинноходовой версии, емкости разгонного и тормозного баллона примерно на 30…35% меньше.
Вывод
1. Использование элементов шарнирного параллелограмма в качестве связующих звеньев между ПКВ и центральными опорными полувалами изменяет облик и улучшает ряд конструктивно-технологических свойств бесшатунного механизма, делает его значительно проще и надежнее. Данное конструктивное решение подтверждено патентом России с авторским приоритетом от 15.09.2009 г.
2. Результаты проведенных исследований дают основание утверждать, что варианты А и Б новых бесшатунных механизмов по своим параметрам становятся привлекательными для использования в поршневых машинах и способны составить достойную конкуренцию КШМ.
Литература
1. С.С. Баландин. Бесшатунные двигатели внутреннего сгорания. М. Машиностроение. 1972 г.
2. В.А. Ворогушин. Устранение эффекта клинения в бесшатунном механизме С.С. Баландина. М. Автомобильная промышленность. № 1, 2009 г.
3. В.Н. Симонов, С.С. Сурак. Размерные цепи бесшатунного механизма ДВС С.С. Баландина. Анализ работоспособности механизма. М. Грузовик. № 10, 2008 г.
4. Е.П.Голубков. Авиационные бесшатунные двигатели внутреннего сгорания. Информационная записка. М. 2009 г. Рег. № 16207 РАО 155 стр. 05.02.2010 г.


